ZHCSRF9A December 2022 – October 2023 DRV8461
PRODUCTION DATA
- 1
- 1 特性
- 2 应用
- 3 说明
- 4 修订历史记录
- 5 引脚配置和功能
- 6 规格
-
7 详细说明
- 7.1 概述
- 7.2 功能方框图
- 7.3 特性说明
- 7.4 编程
- 7.5
寄存器映射
- 7.5.1 状态寄存器
- 7.5.2
控制寄存器
- 7.5.2.1 CTRL1(地址 = 0x04)[默认值 = 0Fh]
- 7.5.2.2 CTRL2(地址 = 0x05)[默认值 = 06h]
- 7.5.2.3 CTRL3(地址 = 0x06)[默认值 = 38h]
- 7.5.2.4 CTRL4(地址 = 0x07)[默认值 = 49h]
- 7.5.2.5 CTRL5(地址 = 0x08)[默认值 = 03h]
- 7.5.2.6 CTRL6(地址 = 0x09)[默认值 = 20h]
- 7.5.2.7 CTRL7(地址 = 0x0A)[默认值 = FFh]
- 7.5.2.8 CTRL8(地址 = 0x0B)[默认值 = 0Fh]
- 7.5.2.9 CTRL9(地址 = 0x0C)[默认值 = 10h]
- 7.5.2.10 CTRL10(地址 = 0x0D)[默认值 = 80h]
- 7.5.2.11 CTRL11(地址 = 0x0E)[默认值 = FFh]
- 7.5.2.12 CTRL12(地址 = 0x0F)[默认值 = 20h]
- 7.5.2.13 CTRL13(地址 = 0x10)[默认值 = 10h]
- 7.5.2.14 CTRL14(地址 = 0x3C)[默认值 = 58h]
- 7.5.3 索引寄存器
- 7.5.4
自定义微步进寄存器
- 7.5.4.1 CUSTOM_CTRL1(地址 = 0x16)[默认值 = 00h]
- 7.5.4.2 CUSTOM_CTRL2(地址 = 0x17)[默认值 = 00h]
- 7.5.4.3 CUSTOM_CTRL3(地址 = 0x18)[默认值 = 00h]
- 7.5.4.4 CUSTOM_CTRL4(地址 = 0x19)[默认值 = 00h]
- 7.5.4.5 CUSTOM_CTRL5(地址 = 0x1A)[默认值 = 00h]
- 7.5.4.6 CUSTOM_CTRL6(地址 = 0x1B)[默认值 = 00h]
- 7.5.4.7 CUSTOM_CTRL7(地址 = 0x1C)[默认值 = 00h]
- 7.5.4.8 CUSTOM_CTRL8(地址 = 0x1D)[默认值 = 00h]
- 7.5.4.9 CUSTOM_CTRL9(地址 = 0x1E)[默认值 = 00h]
- 7.5.5
自动扭矩寄存器
- 7.5.5.1 ATQ_CTRL1(地址 = 0x1F)[默认值 = 00h]
- 7.5.5.2 ATQ_CTRL2(地址 = 0x20)[默认值 = 00h]
- 7.5.5.3 ATQ_CTRL3(地址 = 0x21)[默认值 = 00h]
- 7.5.5.4 ATQ_CTRL4(地址 = 0x22)[默认值 = 20h]
- 7.5.5.5 ATQ_CTRL5(地址 = 0x23)[默认值 = 00h]
- 7.5.5.6 ATQ_CTRL6(地址 = 0x24)[默认值 = 00h]
- 7.5.5.7 ATQ_CTRL7(地址 = 0x25)[默认值 = 00h]
- 7.5.5.8 ATQ_CTRL8(地址 = 0x26)[默认值 = 00h]
- 7.5.5.9 ATQ_CTRL9(地址 = 0x27)[默认值 = 00h]
- 7.5.5.10 ATQ_CTRL10(地址 = 0x28)[默认值 = 08h]
- 7.5.5.11 ATQ_CTRL11(地址 = 0x29)[默认值 = 0Ah]
- 7.5.5.12 ATQ_CTRL12(地址 = 0x2A)[默认值 = FFh]
- 7.5.5.13 ATQ_CTRL13(地址 = 0x2B)[默认值 = 05h]
- 7.5.5.14 ATQ_CTRL14(地址 = 0x2C)[默认值 = 0Fh]
- 7.5.5.15 ATQ_CTRL15(地址 = 0x2D)[默认值 = 00h]
- 7.5.5.16 ATQ_CTRL16(地址 = 0x2E)[默认值 = FFh]
- 7.5.5.17 ATQ_CTRL17(地址 = 0x2F)[默认值 = 00h]
- 7.5.5.18 ATQ_CTRL18(地址 = 0x30)[默认值 = 00h]
- 7.5.6 静音步进寄存器
- 8 应用和实施
- 9 散热注意事项
- 10电源相关建议
- 11布局
- 12器件和文档支持
- 13机械、封装和可订购信息
封装选项
机械数据 (封装 | 引脚)
散热焊盘机械数据 (封装 | 引脚)
订购信息
7.3.6 自动微步模式
当 DRV8461 通过 SPI 接口运行时,自动微步进模式会对输入步进脉冲进行插值,以生成对应于更高分辨率微步进的电流波形。这可在任何步进频率下实现平滑的正弦电流和无噪声运行。
如果禁用自动微步进,系统控制器将被迫输出高频 STEP 信号以生成高分辨率微步进电流波形。
当启用自动微步进时,可以通过低频 STEP 信号生成平滑的电流波形。
这大大减少了控制器开销,有利于 3D 打印机、工厂自动化和医疗等应用。
应确保内插频率不会落在步进电机的谐振频带中。
EN_AUTO 位应为 1b 以启用自动微步进模式。
 图 7-7 自动微步进插值
图 7-7 自动微步进插值DRV8461 支持插值至 1/32、1/64、1/128 或 1/256 微步进级别,此插值通过 RES_AUTO 位来配置,如表 7-13 所示。插值设置可以动态更改。
RES_AUTO | 内插 |
|---|---|
00b(默认值) | 1/256 |
01b | 1/128 |
10b | 1/64 |
11b | 1/32 |
表 7-14 展示了:通过分别向 EN_AUTO 位写入 1b 和 0b 而实现的线圈电流与半步进模式和自动微步进模式之间的平滑过渡。请注意,半步进和 1/256 自动微步进模式下的步进频率相同。
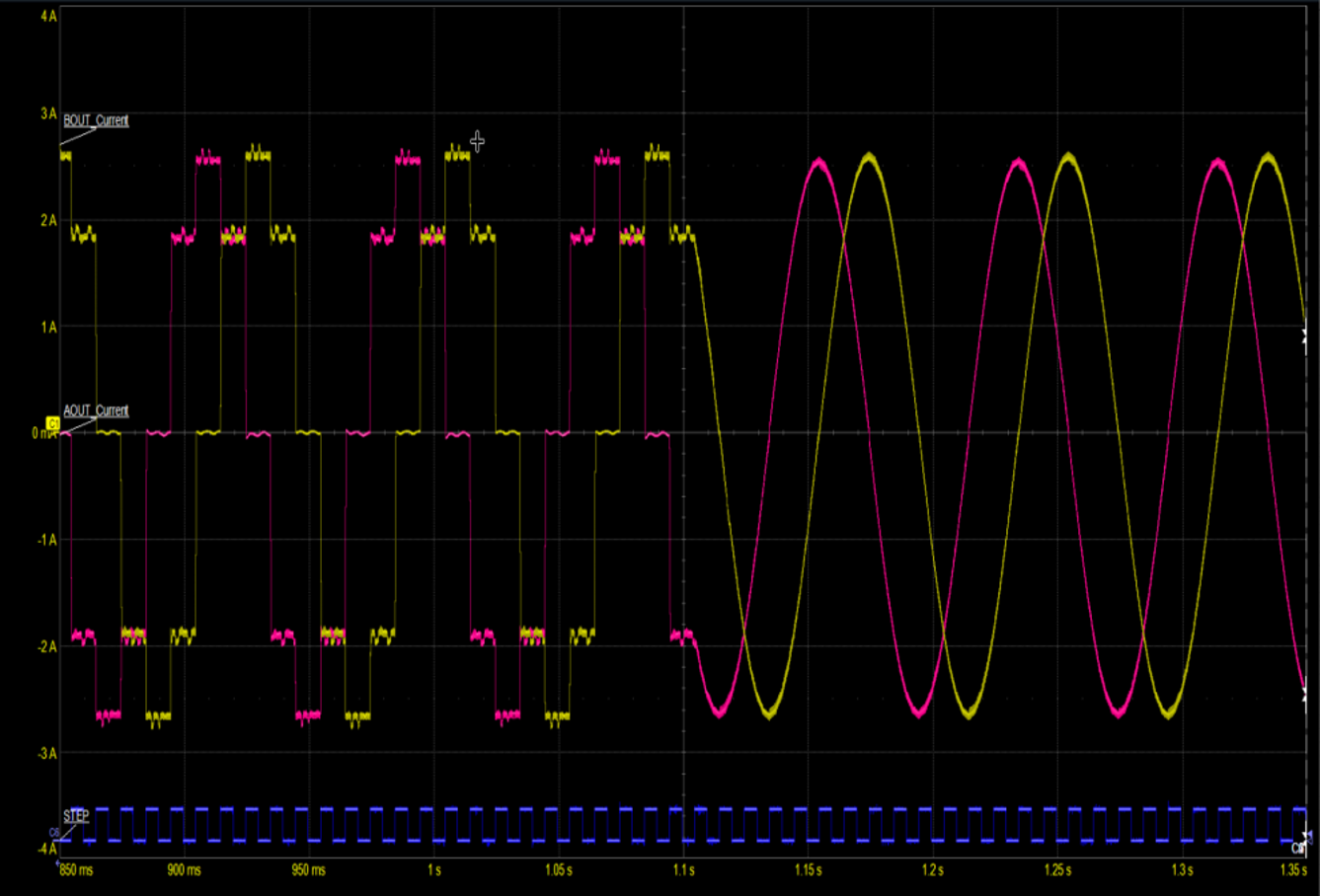 |  |
从半步进模式过渡到 1/256 自动微步进模式 | 从 1/256 自动微步进模式过渡到半步进模式 |
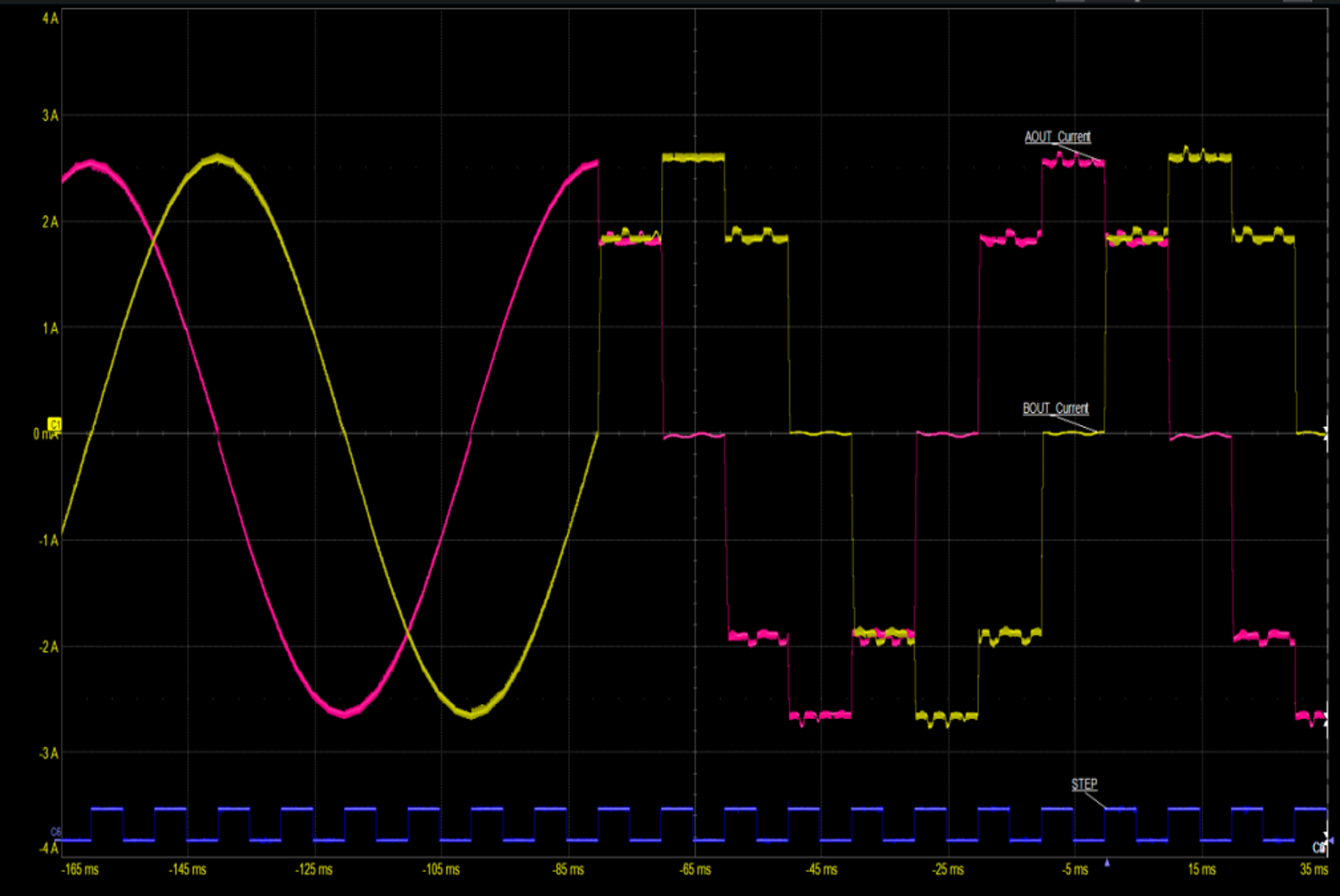
 图 7-8 STEP 频率变化时的自动微步进
图 7-8 STEP 频率变化时的自动微步进如图 7-8 所示,插值是根据两个前一步进脉冲之间的时间完成的。根据 RES_AUTO 位设置,将之前的间隔时间内插为相等的分频。
当输入步进频率与之前的间隔(如段"1"中所示)相比降低时,电机保持其位置,直到出现下一个 STEP 有效边沿。如果 EN_STSL 位为 1b,器件将进入静止省电模式,并且下一个有效边沿不会在 tSTSL_DLY 到期前出现。出现下一个 STEP 有效边沿时退出静止省电模式。
当步进频率比之前的间隔增加时(如段“2”中所示),当下一个 STEP 有源边沿出现时,电机角度会平滑地自动校正,并且分度器会移动到与 STEP 输入对应的位置。在段“3”中,电机角度以更快的速率增加,对应于段“2”的步进频率。
自动微步进模式下的 STEP 输入频率不应介于 10Hz 和 300kHz 之间。
要实现低于 10Hz 全步进等效步进频率的自动微步进,请在启用自动微步进之前使用更高分辨率的微步进设置。
例如,全步进模式下的 1Hz 步进频率对应于 1/16 微步进模式下的 16Hz 步进频率。因此,如果用户希望对全步进 1Hz 步进输入使用自动微步进,可以将 MICROSTEP_MODE 设置为 0110b(1/16 微步进),并使用 RES_AUTO 位实现所需的内插电平。